 下载量:0 评分:8.0 更新时间:2023-07-13 大小:371.3 MB
下载量:0 评分:8.0 更新时间:2023-07-13 大小:371.3 MB
软件介绍
RoboDK是一款价格实惠的工业生产机器人仿真工具,为客户出示形象化的程序编写方法。仿真器适用多种多样运用,比如拿取,喷漆,机器人生产加工这些,优化工具可全自动转换辅助设计生产加工(CAM)程序流程,形成机器人程序流程!
软件基础简介
1、离线编程
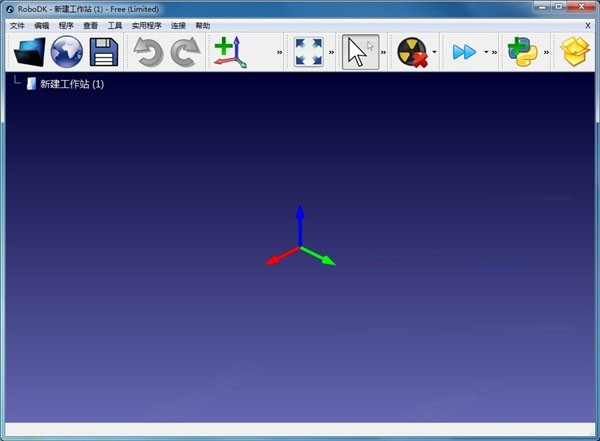
工业机器人离线编程与仿真从未如此简单。直观的用户界面,便于搭建虚拟工作环境,创建坐标系,设定机器人运动轨迹及目标,为多种工业应用预先进行离线编程。
您不再需要学习由各机器人品牌所决定的复杂编程语言。
2、机器人加工
把您的机器人变成一台5轴数控铣削加工机床(CNC)或者3D打印机!仿真并将数控程序(G-code,APT或DXF等程序文件)转化为机器人程序文件。将自动优化机器人轨迹,避免奇异状态(singularities)及轴极限,躲避障碍。
3、机器人模型库
RoboDK的机器人模型库包含来自20多个品牌的工业机器人、机器人外轴以及工业工具。您可以轻松使用任一款机器人,实现任何应用,包括:加工,焊接,切割,喷涂,检测,去毛刺,以及更多。
4、机器人校准
您的机器人不够精确?
机器人校准功能可以提高机器人精确度、改进生产。运行ISO9283机器人性能测试。利用球杆仪测试来验证您的机器人。
5、输出程序到您的机器人
软件的后处理器(Post Processors)支持多种机器人控制器,包括:
ABB RAPID(mod/prg)
Fanuc LS(LS/TP)
Kuka KRC/IIWA(SRC/java)
Motoman Inform(JBI)
Universal Robots(URP/script)
软件特性
1、取放
简单的拾取与放置仿真。
2、使用Python取放
这个范例演示了如何使用Python来实现取放
3、机器人绘图
用你的机器人仿真绘制SVG图像文件,在项目中使用来自第三方的Python库。
4、机器人铣削
把你的机器人变成CNC,轻松导入NC-code(G-code或APT),生成机器人程序文件。
5、自动传送带
仿真机械传送带以及任何类似的机械装置,使用Python应用程序编程接口。
6、DXF到机器人程序文件
将DXF图形文件转化成机器人程序文件。
7、使用机器人外轴铣削
同步机器人与外轴进行铣削。
8、喷涂
生成机器人路径进行喷涂或者质量检测。
9、点焊
在软件中简单实现点焊与钻孔
10、3D打印
使用工业机器人实现3D打印的简单步骤
11、2D相机仿真
在自动生产线中嵌入2D相机进行视觉检测。
12、离线编程
离线编程意味着在生产线外进行机器人编程。离线编程避免了在线编程导致的生产“停机”时间,通过离线编程与仿真可以更好地调试与规划工作空间、避免出错。
用合适的仿真器进行离线编程将最大化机器人系统的投资回报率。给机器人设计新任务所需要的时间由数周缩短到数天,短期生产也可实现“机器人化”。
13、用RoboDK实现离线编程
使用该软件进行离线编程没有限制。该软件友好的用户图形界面方便了工业机器人仿真。应用程序编程接口(API)意味着您可以使用Python给机器人编程。该软件支持多种品牌的机器人控制器,给您的机器人输出相应的程序文件。您还可以根据需要编辑后处理器(Post Processor)。
Python让您更快、更有效地整合您的系统。相较于其他编程语言来说,Python更简单有效,并且容易学习。版本Python 3.7.3将随程序自动安装。
该软件用于Python的应用程序编程接口(API)参考资料以及范例在这里。该软件的应用程序编程接口(API)与C(包括范例)以及Matlab也兼容。
14、机器人后处理器(Post Processor)
后处理器负责生成机器人程序文件。仿真中的任意机器人状态可由后处理器转化为相应的机器人指令。后处理器可以灵活满足生成机器人程序文件时的特定要求。
该软件为多数机器人品牌建立了后处理器。我们也可以根据需要生成适合您的后处理器。
安装步骤
1、在本站下载该软件并解压
2、打开软件安装包点击确认

3、选择安装路径点击下一步
4、等待安装完成即可
软件官网
https://robodk.com/
软件综述
RoboDK 机器人仿真软件 4.2.3是一款用于机器人编程、仿真和离线编程的强大工具。其最新版本 4.2.3 新增了多项新功能和改进,使其成为更全面的机器人仿真解决方案。
新功能和改进:
- 基于云的协作:新增加的云存储功能,支持团队成员之间的协作,允许他们在不同设备上访问和编辑项目。
- 运动规划和优化:新的基于树的路径规划器,提供了快速的路径优化,并支持关节限制和碰撞检查。
- UR 机器人的扩展支持:现在完全支持 Universal Robots 的 e-Series 机器人,包括 UR3e、UR5e 和 UR10e。
- 新的机器人模型:新增了许多可供选择的机器人模型,包括 ABB IRB 140、KUKA LBR iiwa 和 Fanuc R-2000iC。
- 用户界面改进:更新后的用户界面,提供了更直观和用户友好的体验。
- 性能优化:性能和稳定性方面进行了多项改进,确保更流畅和可靠的仿真。
优势:
- 准确的仿真:RoboDK 4.2.3 提供高度准确的机器人仿真,可以可靠地预测机器人在现实世界中的行为。
- 离线编程:支持离线编程,允许用户在不使用实际机器人的情况下编写和调试机器人程序。
- 广泛的机器人支持:支持广泛的工业机器人,包括 ABB、KUKA、Fanuc、Universal Robots 等。
- 易于使用:直观的用户界面和全面的文档,使即使是初学者也能轻松使用。
- 强大的功能:提供路径规划、碰撞检测、工艺仿真和高级运动控制等强大功能。
总的来说,RoboDK 机器人仿真软件 4.2.3 是机器人编程和仿真的一款功能强大且用户友好的工具。它提供了准确的仿真、广泛的机器人支持和易于使用的界面,使其成为工程师、研究人员和机器人开发人员的理想选择。


暂无评论内容