软件介绍
机器人快车(RoboExp)是一款由中鸣开发的机器人编程软件,RoboExp通过机器人快车用户能够通过编程实现对机器人的控制,有需要的可以下载使用。

软件基础简介
RoboExp最新版是专业性比较高的机器人编程工具,RoboExp最新版可以帮助使用者通过编程实现对机器人的控制,比传统的文本编程更加高级,体现在于它的易用性、易读性,非常适合于培养编程思维。RoboExp官方版特别是适用于青少年的素质教育,它是完全开放的,方便大家更有效的学习,可以学习到功能模块的内核,还可以自己定义自己的功能模块。
软件特性
LibV427只针对RoboExpV5.7及以上版本升级。如果低于这个版本的,请下载V5.7安装包安装后再升级。
IIC总线模块的地址
BE-2610:3B
BE-5221: 02
BE-1721: 03
BE-6301: 04
BE-9231: 05
BE-1311: 06
BE-4200: 07
BE-2560: 07
BE-1722: 08
BE-2620: 38
BE-2628: E6
BE-1118: 0A
BE-1723: 07
BE-1729: 18
BE-1132: A8或350
BE-1141: A8
BE-1531 32
BE-9253 50
BE-1245 52
BE-6205 06
BE-6303: 0X04
BE-1727: 0x02
BE-2615: 0x76
BE-2620: 0XA6
BE-5235: 0X18
软件优点
点击菜单栏中“工具”主菜单下的“选项”子菜单,您可以在弹出的对话框中设置机器人快车的系统参数。
1、选择编译器
RoboExp最新版的编译功能必须通过编译器才能实现,所以在编译之前必须为机器人快车指定一个编译器。在选项对话框中点击“编译器”项
点击“浏览”按钮,然后在对话框中选择中鸣编译器(JMCompiler.exe)或其它编译器。中鸣编译器(JMCompiler.exe)可以在机器人快车安装目录下的Compiler目录下找到,我们一般使用该编译器。
2、全局设置
机器人快车允许不同版本的函数共存。所以在使用中会遇到不同版本函数的选择问题(具体请参看“模块更新”项目)。我们可以设置让系统随时提醒更新。在选项对话框中点击“全局设置&
不用提示更新:当您打开项目时,如果项目的模块版本与当前机器人快车的模块版本不相同,系统不会弹出提示更新的对话框。虽然系统没有提示,但您可以通过点击“工具”主菜单下的,“更新模块”子菜单进行手动更新。
提示更新:当您打开项目时,如果项目的模块版本与当前机器人快车的模块版本不相同,系统会弹出提示更新的对话框。
在下载前编译文件:在下载到机器人的程序,在下载前先编译它。
下载后校验数据:下载到机器人上的程序后,是否校验下载到机器人RCU中的程序是否正确。一般来说都是正确,所以有时就不用选中,以便节省下载时间。
注意事项
RoboExpv6.0版本,支持库升级为Microsoft.NET Framework 4.0
RoboExpV6.0版本已停止对IQRobot、IQ2Robot、SuperRCU、BasicRCU、ERCU、XRCU、X1RCU、X2RCU等RCU的维护与更新,如果需要使用以上类型的RCU,请下载机器人快车5.5或更低的快车版本。
安装步骤
1、完成软件下载点击.exe文件并鼠标右键可以创建桌面快捷键
2、双击软件弹出软件选项全局设置弹框,点击确定即可关闭弹框进入软件
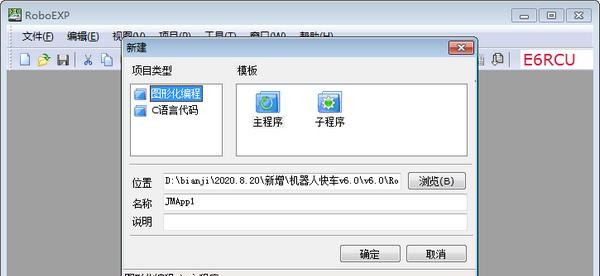
3、进入编程软件项目创建界面,可以点击新建项目进行项目编辑
4、点击新建按钮弹出项目新建弹框,该弹框可以进行项目类型选择
5、点击图像化编程项目创建进入该界面可以进行图像项目编辑
6、点击软件左边的图标工具可以进行控件添加
7、点击文档按钮弹出文档管理弹框,点击选择文档可以进行项目添加
8、点击文本按钮弹出文本框,点击输入框输入文字然后点击确定即可进行文本添加
9、点击选择C语言代码项目创建可以进行饮用程序代码编辑
软件官网
http://www.roboexp.com/
软件综述
RoboExp 6.0.5是一款功能强大的机器人仿真软件,具有以下优点:
1. 逼真的物理仿真:
RoboExp 使用先进的物理引擎来模拟机器人运动和与环境的交互,提供逼真的仿真体验。
2. 直观的建模工具:
用户可以使用复杂的建模工具轻松创建和修改机器人模型,包括关节、刚体和传感器。
3. 详细的传感器建模:
RoboExp 支持各种传感器,如距离传感器、相机和力传感器,使机器人能够感知其周围环境。
4. 运动规划算法:
RoboExp 集成了多个运动规划算法,允许用户为机器人生成运动轨迹,避免碰撞和优化性能。
5. ROS 兼容性:
RoboExp 与机器人操作系统 (ROS) 兼容,允许用户与其他 ROS 应用程序集成和交互。
6. 脚本和编程接口:
用户可以使用 Python 或 Lua 编程接口自动化任务、创建自定义控制器和分析仿真结果。
7. 丰富的文档和教程:
RoboExp 提供广泛的文档和教程,帮助用户快速入门并了解软件的各个方面。
缺点:
- 价格昂贵:RoboExp 是一个商业软件,其定价可能会限制个别用户或初创企业的可访问性。
- 系统要求高:RoboExp 需要强大的硬件才能流畅运行复杂的仿真。
- 技术支持有限:对于个人用户,RoboExp 可能无法提供与大型企业或组织相同的技术支持级别。
总体而言,RoboExp 6.0.5 是一款功能强大且用户友好的机器人仿真工具,非常适合研究人员、工程师和学生进行机器人设计、运动规划和控制算法开发。


暂无评论内容